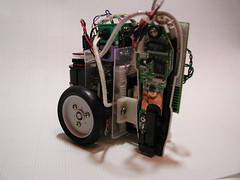
 I haven’t had much time to work on any of my previously-posted projects in recent weeks (or months, for that matter). I’m just finishing up work for the Computational Art course I started in February; I did some interesting things that I’ll post here once I’ve finished the write-ups. Most notable is a small Propeller-based robot for teaching little kids some of the key concepts of programming. At the moment, however, it’s still more of a sculpture than an interactive piece.
I haven’t had much time to work on any of my previously-posted projects in recent weeks (or months, for that matter). I’m just finishing up work for the Computational Art course I started in February; I did some interesting things that I’ll post here once I’ve finished the write-ups. Most notable is a small Propeller-based robot for teaching little kids some of the key concepts of programming. At the moment, however, it’s still more of a sculpture than an interactive piece.
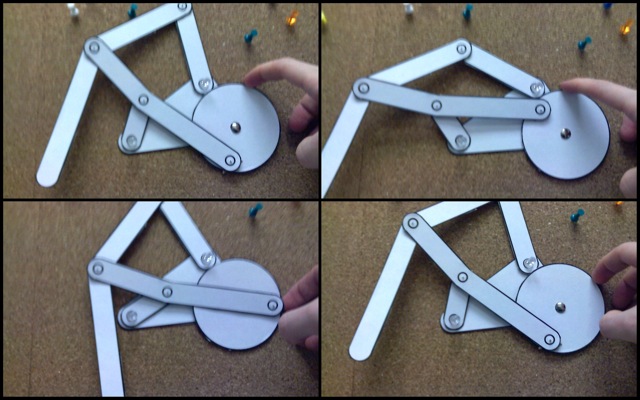
But, on the topic of robots, I had an idea for a mechanical spider and used a little downtime at work a while back to produce a 3D sketch. I roughed out an animation to see how it worked. No, the animation to the left does not loop correctly; I’ll explain that later.
Like almost all the mechanical spiders that people have been producing lately, it’s based on the brilliantly clever Klann Research and Development design. Apart from cosmetic details, I made two small changes:
First, the inner and outer pairs of legs are offset slightly; the inner legs are slightly forward. The mechanical spider design is really more crab-like than spider-like, as all the legs operate on parallel planes. Moving one set of legs forward attempts to give it a slightly more spidery feeling.
Second, the motion of the leg pairs has been offset by 30 to 120 degrees. This was also an attempt to give the ‘bot a more spider-like appearance by roughly approximating the asymmetric gait of a stalking spider. I’m not sure if it’ll work in the real world. Putting the legs out of phase is what made the animation non-looping; the animation would have to be much longer to contain a looping cycle of all legs. Plus, I wasn’t very precise when it came to offsetting the motion, so I wasn’t entirely sure where the loop was going to occur, anyway.
I’m not sure I like the serrated edges on the front of each leg. Most of the mechanical spiders people build seem to have them. I thought they may have a practical purpose, possibly in climbing, but I’m now fairly certain that they’re just cosmetic. But being overdone, I may try to think of something else. I’d also like to make the front and back legs somewhat different-looking; the uniformity is another feature that makes such spider designs look crabby. I might also try to make the inner and outer legs slightly different, should I actually build the monster. I think I could very probably do it; axles and spacers aside, it is designed to be constructed from flat stock of the same thickness, which I could probably laser cut at the Fab Lab in an hour. Preparing the vector files in order to do the cutting would take longer, however.
But, that’s yet another project for the pile.
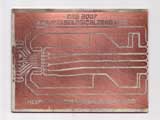




 I received my order from Electronics Goldmine late last week. It contained, among other things, a couple of items for the Motor Controller Project: several 3″x4″ pieces of copper-clad board and twenty 1N5404 diodes (3A, 400V). I knew these were overkill, but I figured it was safer to err on the side of caution.
I received my order from Electronics Goldmine late last week. It contained, among other things, a couple of items for the Motor Controller Project: several 3″x4″ pieces of copper-clad board and twenty 1N5404 diodes (3A, 400V). I knew these were overkill, but I figured it was safer to err on the side of caution.
